// To render the DXF file from the command line:
// openscad -o tripod.dxf -D'mode="parts"' example017.scad
// mode = "parts";
// mode = "exploded";
mode = "assembled";
thickness = 6;
locklen1 = 15;
locklen2 = 10;
boltlen = 15;
midhole = 10;
inner1_to_inner2 = 50;
total_height = 80;
echo(version=version());
module shape_tripod()
{
x1 = 0;
x2 = x1 + thickness;
x3 = x2 + locklen1;
x4 = x3 + thickness;
x5 = x4 + inner1_to_inner2;
x6 = x5 - thickness;
x7 = x6 - locklen2;
x8 = x7 - thickness;
x9 = x8 - thickness;
x10 = x9 - thickness;
y1 = 0;
y2 = y1 + thickness;
y3 = y2 + thickness;
y4 = y3 + thickness;
y5 = y3 + total_height - 3*thickness;
y6 = y5 + thickness;
union()
{
difference() {
polygon([
[ x1, y2 ], [ x2, y2 ],
[ x2, y1 ], [ x3, y1 ], [ x3, y2 ],
[ x4, y2 ], [ x4, y1 ], [ x5, y1 ],
[ x5 + thickness, y3 ], [ x5, y4 ],
[ x5, y5 ],
[ x6, y5 ], [ x6, y6 ], [ x7, y6 ], [ x7, y5 ], [ x8, y5 ],
[ x8, y6 ], [ x9, y5 ],
[ x9, y4 ], [ x10, y3 ],
[ x2, y3 ]
]);
translate([ x10, y4 ]) circle(thickness);
translate([ x5 + thickness, y4 ]) circle(thickness);
}
translate([ x5, y1 ])
square([ boltlen - thickness, thickness*2 ]);
translate([ x5 + boltlen - thickness, y2 ]) circle(thickness);
translate([ x2, y2 ]) intersection() {
circle(thickness);
translate([ -thickness*2, 0 ]) square(thickness*2);
}
translate([ x8, y5 ]) intersection() {
circle(thickness);
translate([ -thickness*2, 0 ]) square(thickness*2);
}
}
}
module shape_inner_disc()
{
difference() {
circle(midhole + boltlen + 2*thickness + locklen2);
for (alpha = [ 0, 120, 240 ])
rotate(alpha) translate([ 0, midhole + boltlen + thickness + locklen2/2 ]) square([ thickness, locklen2 ], true);
circle(midhole + boltlen);
}
}
module shape_outer_disc()
{
difference() {
circle(midhole + boltlen + inner1_to_inner2 + 2*thickness + locklen1);
for (alpha = [ 0, 120, 240 ])
rotate(alpha) translate([ 0, midhole + boltlen + inner1_to_inner2 + thickness + locklen1/2 ]) square([ thickness, locklen1 ], true);
circle(midhole + boltlen + inner1_to_inner2);
}
}
module parts()
{
tripod_x_off = locklen1 - locklen2 + inner1_to_inner2;
tripod_y_off = max(midhole + boltlen + inner1_to_inner2 + 4*thickness + locklen1, total_height);
shape_inner_disc();
shape_outer_disc();
for (s = [ [1,1], [-1,1], [1,-1] ])
scale(s) translate([ tripod_x_off, -tripod_y_off ]) shape_tripod();
}
module exploded()
{
translate([ 0, 0, total_height + 2*thickness ]) linear_extrude(height = thickness, convexity = 4) shape_inner_disc();
linear_extrude(height = thickness, convexity = 4) shape_outer_disc();
color([ 0.7, 0.7, 1 ]) for (alpha = [ 0, 120, 240 ])
rotate(alpha) translate([ 0, thickness*2 + locklen1 + inner1_to_inner2 + boltlen + midhole, 1.5*thickness ])
rotate([ 90, 0, -90 ]) linear_extrude(height = thickness, convexity = 10, center = true) shape_tripod();
}
module bottle()
{
r = boltlen + midhole;
h = total_height - thickness*2;
rotate_extrude(convexity = 2)
{
square([ r, h ]);
translate([ 0, h ])
intersection() {
square([ r, r ]);
scale([ 1, 0.7 ]) circle(r);
}
translate([ 0, h+r ])
intersection() {
translate([ 0, -r/2 ]) square([ r/2, r ]);
circle(r/2);
}
}
}
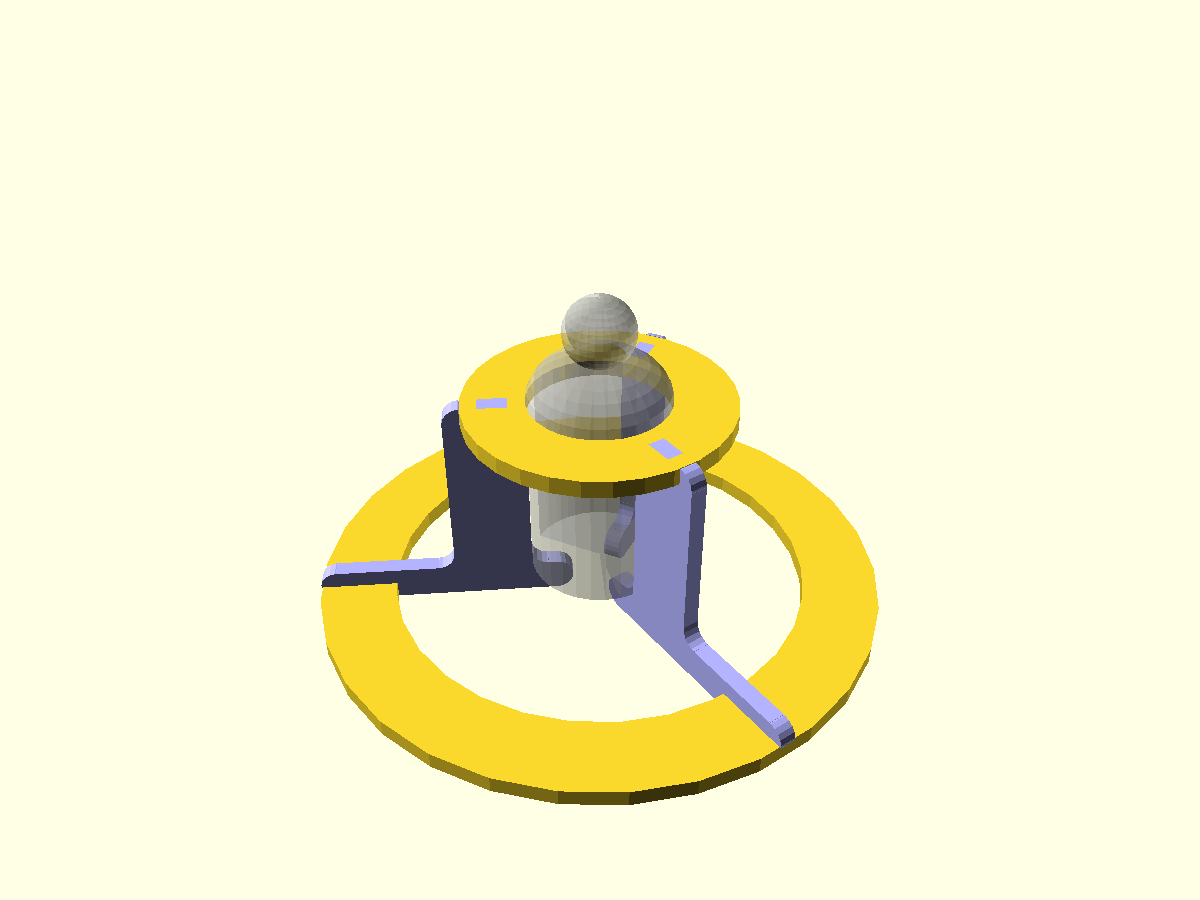
module assembled()
{
translate([ 0, 0, total_height - thickness ]) linear_extrude(height = thickness, convexity = 4) shape_inner_disc();
linear_extrude(height = thickness, convexity = 4) shape_outer_disc();
color([ 0.7, 0.7, 1 ]) for (alpha = [ 0, 120, 240 ])
rotate(alpha) translate([ 0, thickness*2 + locklen1 + inner1_to_inner2 + boltlen + midhole, 0 ])
rotate([ 90, 0, -90 ]) linear_extrude(height = thickness, convexity = 10, center = true) shape_tripod();
% translate([ 0, 0, thickness*2]) bottle();
}
if (mode == "parts")
parts();
if (mode == "exploded")
exploded();
if (mode == "assembled")
assembled();
// Written by Clifford Wolf <clifford@clifford.at> and Marius
// Kintel <marius@kintel.net>
//
// To the extent possible under law, the author(s) have dedicated all
// copyright and related and neighboring rights to this software to the
// public domain worldwide. This software is distributed without any
// warranty.
//
// You should have received a copy of the CC0 Public Domain
// Dedication along with this software.
// If not, see <http://creativecommons.org/publicdomain/zero/1.0/>.